



6-Axis Education կամ Articulated Robot Arm Diy Delta կամ Camera Robot Arm
Հստակեցում
Առանցք:6
Առավելագույն ծանրաբեռնվածությունը՝ 4 կգ
Կրկնվող դիրք՝ ± 0.01 մմ
Օգտագործման խոնավությունը՝ 20-80%
եղեսպակի միջավայր՝ 0℃-45℃
Տեղադրում: Հող
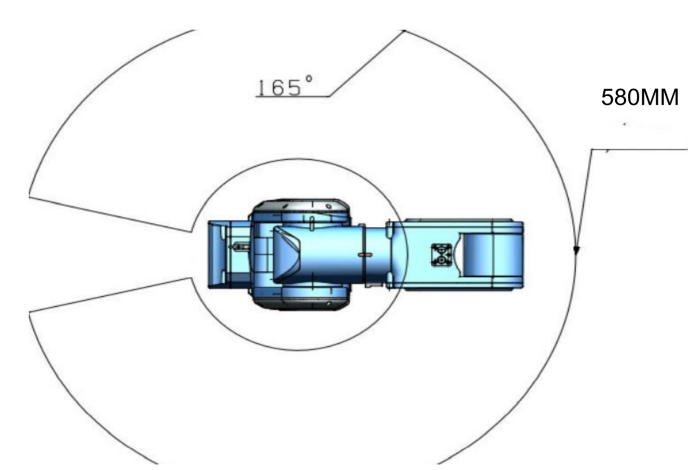
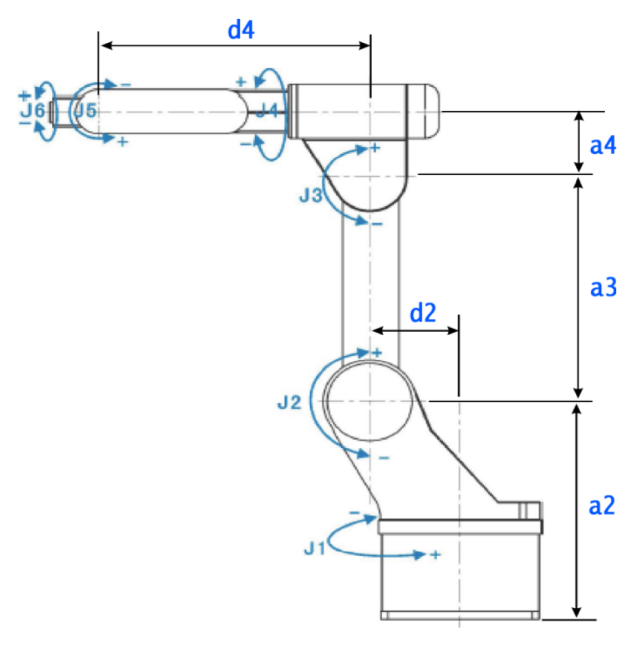
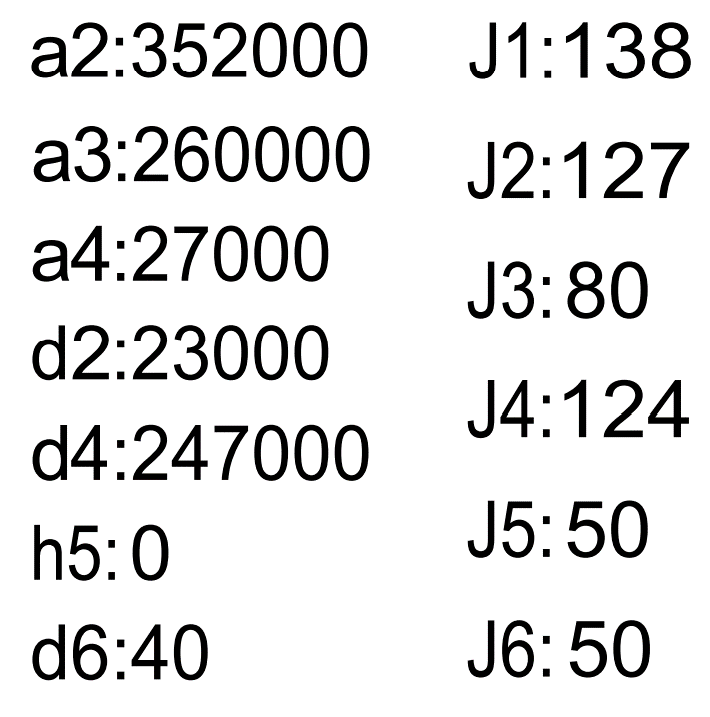
Աշխատանքային միջակայք՝ J1:±165°
J2:-100°~+120°
J3:+150° ~ -60°
J4:±175°
J5:+130° ~-30°
J6:±180°
Առավելագույն արագությունը՝ J1:260°/վ
J2:250°/վ
J3:250°/վ
J4:250°/վ
J5:200°/վ
J6:760°/վ
աշխատանքային միջակայք:
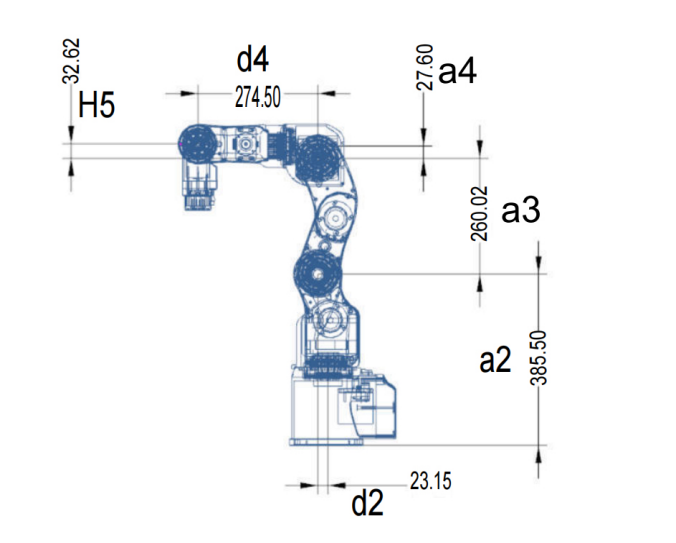
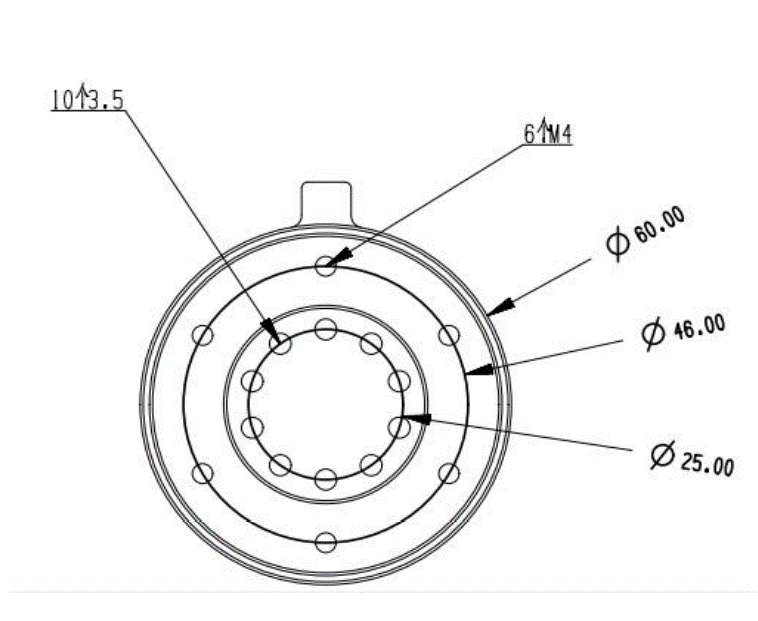
բազայի տեղադրում.
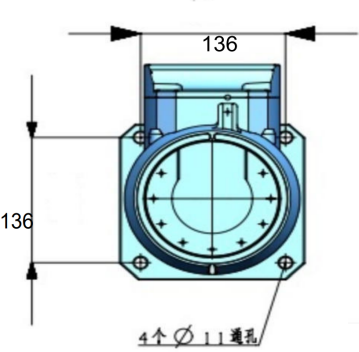
բազայի տեղադրում.
Դիմումներ
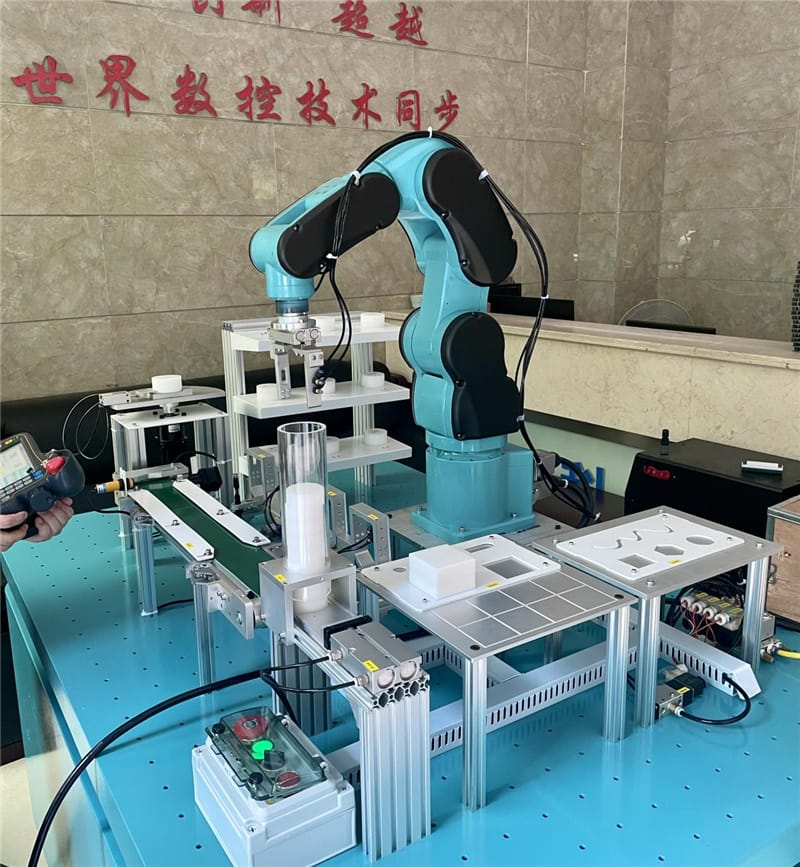
Կրթական հավելվածներ.
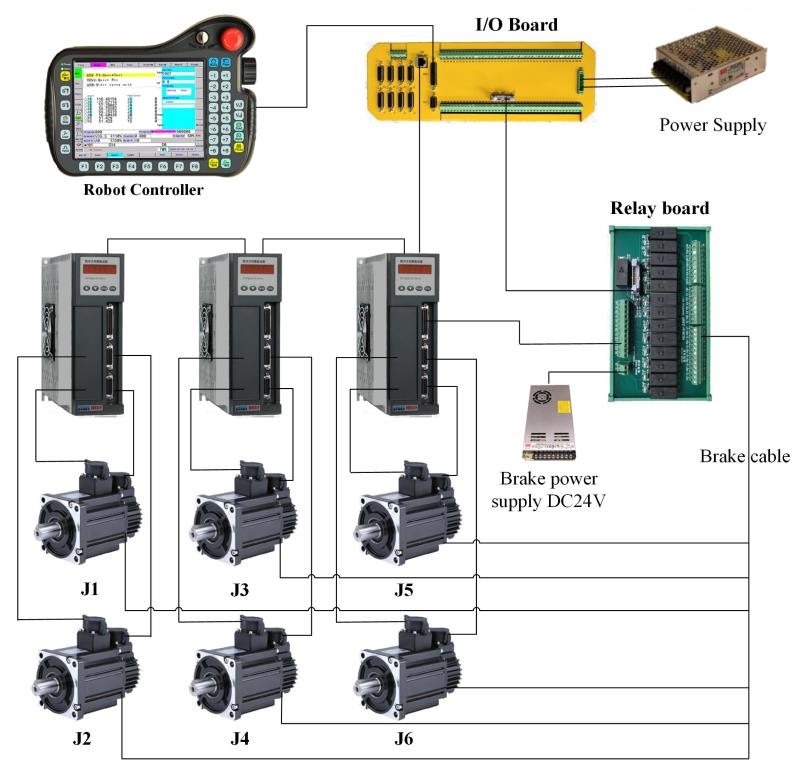
1. Ուսումնասիրել ռոբոտային համակարգի հիմնական կազմը.
2. Ուսումնասիրել ռոբոտի դասավանդման ծրագրավորման և դասավանդման գործառույթները:
3. Ուսումնասիրել ռոբոտների օֆլայն ծրագրավորման հիմնական գիտելիքները։
4. Ուսումնասիրել ռոբոտ io-ի գործառնությունը և կիրառական ծրագրավորումը:
5. Ուսումնասիրել ռոբոտի տեսողական հավելվածները
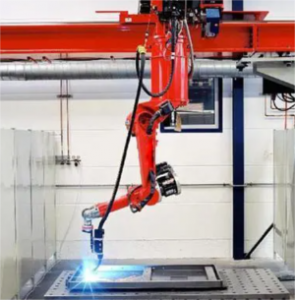
Առևտրային տեսարաններ. ռոբոտ պաղպաղակ Robot Bartender Robot սուրճ Ռոբոտի կաթ թեյ Թեթև արդյունաբերության տեսարաններ. Չափում Dispensing Inspection Տեսակավորում
Ապրանքի առանձնահատկությունները
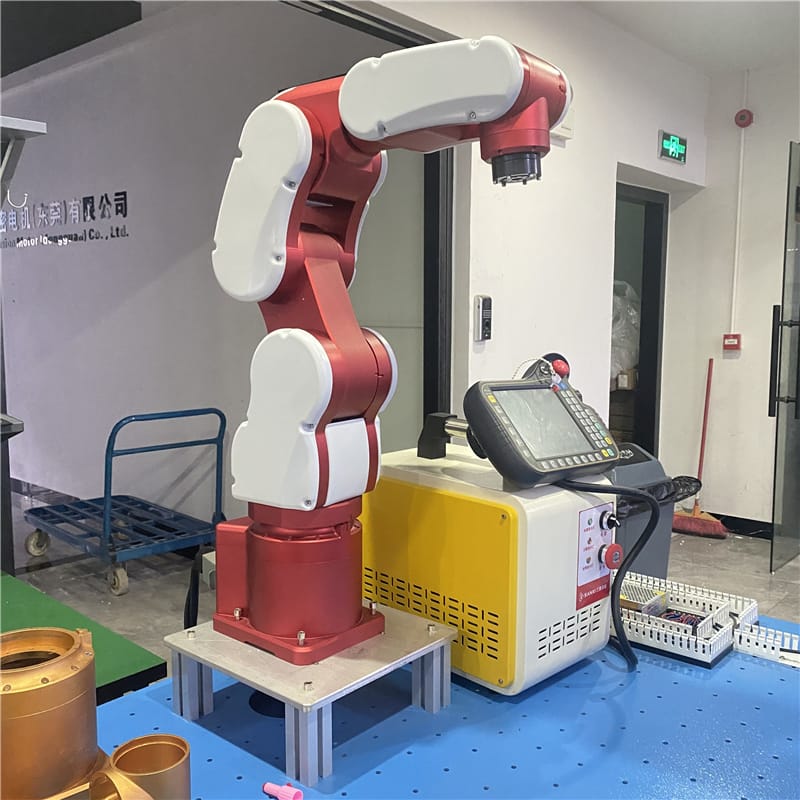
Ռոբոտային թեւ: Ռոբոտային թեւը պատրաստված է ալյումինե ձուլվածքներից CNC մշակման կենտրոնի միջոցով, իսկ մակերեսը ցողված է պլաստիկով և ունի գեղեցիկ տեսք:
Պահպանված մալուխի անցք: Ռոբոտի թեւն ունի մալուխային անցքեր, որոնք գեղեցիկ են և չեն խոչընդոտում մանիպուլյատորի աշխատանքին: Շնչափողի վերջը վերապահված է նավահանգստի և տվյալների մալուխի միակցիչի համար:
Վերահսկիչի վահանակ: Մեծ էկրանով LCD էկրան, լեզվի ցուցադրման մեթոդը կարող է հիմնված լինել հաճախորդի կարիքների, պարզ և հստակ շահագործման և ծրագրավորման վրա, առցանց պարամետրերի փոփոխման և անսարքությունների ինքնաախտորոշման գործառույթներով:
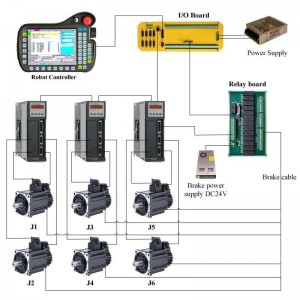
Ռոբոտների կառավարման կաբինետ: Շարժման խելացի կառավարման համակարգը ընդունում է արդյունաբերական համակարգչային տեխնոլոգիա, և ամբողջովին թվային սերվո մոդուլը ապահովում է շարժիչ ուժ ռոբոտի յուրաքանչյուր հանգույցի AC սերվո շարժիչների համար:
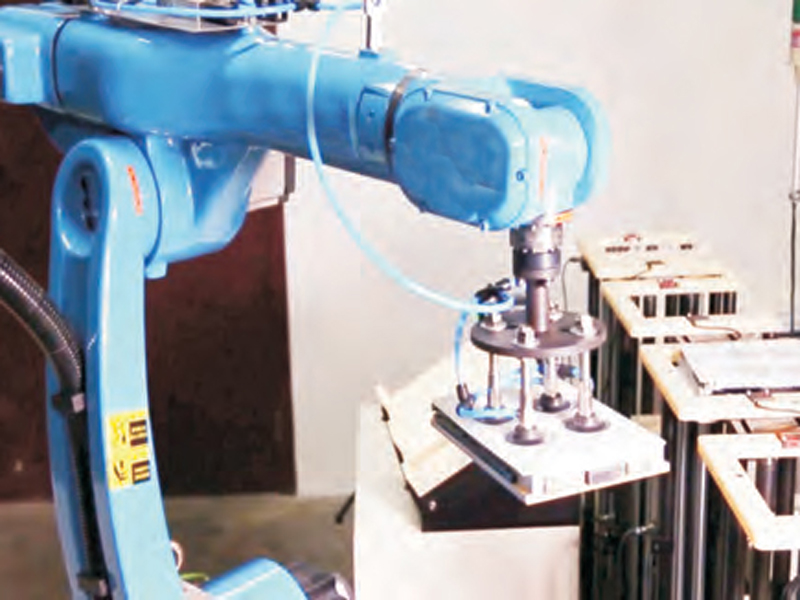
Ռոբոտային հարմարանքներ. Գործիքավոր սարքը կարող է ընտրել տարբեր ծանրություն և քանակ՝ ըստ հարմարեցված պահանջների, և այն տեղադրվում է ծայրի եզրին, որը հեշտ է կարգավորվում և ունի օգտագործման լայն շրջանակ: